
В научно-методическом журнале "Культура физическая и здоровье" в №4 (2024) была опубликована эта статья.
Описание фазы загрузки в физической модели горнолыжного спортивного поворота
УДК 796.015.12, 796.012.4, 796.012.5
Спорт, ORCID (А.Ривлин) 0009-0008-3172-8789
А.А. Ривлин
АНОДО "Учебный центр Федерации
горнолыжного спорта и сноуборда России",
Россия, 117452, Москва, Балаклавский пр-кт, 16,
e‒mail: alriv@inbox.ru
Аннотация
В статье рассмотрена фаза загрузки [10] в рамках физической модели спортивного поворота, состоящая из двух фаз: фазы инициации поворота и фазы ведения дуги поворота. В фазе инициации поворота создаются благоприятные условия для ведения дуги поворота с динамикой стойки минимизирующей силы сопротивления движению. В фазе инициации поворота корректируется скорость лыжника, увеличивается его наклон внутрь траектории поворота, искривляется траектория центра масс в плоскости склона, восстанавливается положение динамического метастабильного равновесия.
Это все осуществляется благодаря проскальзыванию лыж и созданию угла скольжения в совокупности с динамичным распрямлением тела лыжника вдоль опорной линии, увеличивающем опорные реакции и силы трения. Диссипативные силы в фазе инициации поворота увеличиваются. Фаза инициации плавно перетекает в фазу ведения, в которой созданный наклон тела и опорные реакции сохраняются примерно в одинаковых значениях. Угол скольжения, достигший своего максимума в фазе инициации, плавно и быстро уменьшается, сходя на нет в начале разгрузки с момента уменьшения опорных реакций. Стойка спортсмена в фазе ведения стабильна, малодинамична, сбалансирована и соответствует состоянию динамического метастабильного равновесия, предрасположена к плавному сгибанию вдоль опорной линии с плавным увеличением ангуляции на протяжении всей фазы ведения. Диссипативные силы в фазе ведения уменьшаются. Лыжник в фазе ведения старается максимально разогнаться по траектории поворота, уменьшая аэродинамическое сопротивление, улучшая скольжение, используя для этого свои ощущения и мелкую моторику.
В статье обоснована необходимость управления опорными реакциями в горнолыжном повороте, необходимость их перераспределения и приведения к одинаковым значениям в фазе ведения. Обоснована необходимость проскальзывания лыж в фазе инициации для балансировки стойки, для корректировки скорости и траектории, для увеличения наклона.
В статье введено понятие "упора" в повороте и показано положение тела, необходимое для выполнения упора на примере построения простейшей механической системы "лыжник-лыжи", дано определение полностью выпрямленной ноги в горнолыжной трактовке.
В статье определено состояние равновесия спортсмена горнолыжника в повороте как динамическое метастабильное равновесие.
Показано построение стойки по подобию механической системы с шестью степенями свободы, состоящей из двух кинематических звеньев, соединенных сферическим шарниром. Такое построение позволяет наиболее эффективно управлять равновесием, балансом, осуществлять контроль опорных реакций, минимизировать диссипативные силы.
Ключевые слова: горные лыжи, спорт, биомеханика, условие равновесия, баланс, слалом, методика, наука, обучение, физиология, поворот, загрузка, разгрузка, ведение, инициация, фазы, траектория.
DESCRIPTION OF THE LOADING PHASE IN THE PHYSICAL MODEL OF ALPINE SKIING TURN
Rivlin, Al. Al., Lecture Center of the Russian Alpine skiing Federation
Abstract
The article considers the loading skis phase [10] within the framework of the physical model of a sports alpine skiing turn, consisting of two phases: the phase of initiation of the turn and the phase of conducting the arc of the turn. In the phase of initiation of the turn favorable conditions are created for conducting the arc of the turn with the dynamics of the skier stance minimizing the force of resistance to movement. In the phase of initiation of the turn, the speed of the skier is adjusted, its slope inside the trajectory of the turn increases, the trajectory of the center of mass in the plane of the slope is bent, the position of the metastable dynamic equilibrium is restored.
All this is done due to the slipping of the skis and the creation of a ski atack angle in combination with the dynamic straightening of the skier's body along the support line, increasing the support reactions and friction forces. Dissipative forces increase in the phase of initiation of the turn. The initiation phase smoothly flows into the phase of conducting the arc of the turn, in which the created body tilt and support reactions are maintained at approximately the same values. The skis attack angle, which reached its maximum in the initiation phase, gradually decreases, coming to naught at the end of the loading phase with a decrease in the support reactions. The athlete's stance in the phase of conducting the arc of the turn is stable, low-dynamic, balanced and corresponds to the position of metastable dynamic equilibrium, and predisposed to smooth compression along the suppot line throughout the entire phase of conducting the arc. Dissipative forces in the phase of conducting the arc decrease, the skier is in this phase tries to accelerate as much as possible along the trajectory of the turn, reducing aerodynamic drag, improving sliding, using his senses and fine motor skills for this.
The article substantiates the need to control support reactions in the ski turn, redistribution and conversion of the support reactions to equal values. The necessity of slipping skis in the initiation phase to balance the stance, adjust the speed and trajectory, and increase the slope is justified.
The article introduces the concept of a pivot stop and shows by the example of building a "skier-ski" system in the form of a simple mechanical system, the definition of a fully straightened leg in the ski interpretation is given.
The article defines the state of equilibrium of an alpine skier athlete in a turn as a dynamic metastable equilibrium.
The construction of a skier stance in the likeness of a mechanical system with six degrees of freedom, consisting of two kinematic links connected by a spherical hinge, is shown. Such a construction allows you to most effectively manage the state of equilibrium, balance, control the support reactions, and minimize dissipative forces.
Keywords: alpine skiing, sports, biomechanics, equilibrium condition, balance, slalom, methodology, science, training, physiology, rotation, loading, unloading, guidance, initiation, phases, trajectory.
Введение
В данной статье рассматривается классический спортивный горнолыжный поворот, при выполнении которого увеличение угла скольжения приводит к увеличению поперечных движению сил трения и уменьшению скорости лыжника. Поворот при этом выполняется без ротации таза от поворота, что иногда может применяться при дрифте.
Динамическое метастабильное равновесие.
Лыжник, ориентируясь на внешние силы при выполнении поворота [10], стремится выполнять поворот в положении наиболее близком к равновесному. Это следует из механического, методического и физиологического аспектов [10].
Несмотря на его усилия в выполнении равновесного поворота, равнодействующая опорных реакций имеет тенденцию хаотичного отклонения от центра масс лыжника и может пройти через его центр масс практически случайно, эпизодически. Фактически лыжник по мере прохождения поворота находится все время в состоянии потерь и восстановлений равновесия, стараясь все время минимизировать хаотичные отклонения равнодействующей опорных реакций от своего центра масс.
Тем не менее, горнолыжник при выполнении поворота, учитывая возможность перераспределения нагрузки между лыжами, так как имеет две точки опоры и возможность при этом перемещения опорной точки в некотором поперечном диапазоне между лыжами (точки А и Б рис.1), находится в некой потенциальной яме с характерными признаками устойчивого равновесия.
Поэтому при движении лыжника с сохранением диапазона перемещений опорной точки, ограниченного лыжами, отклонения равнодействующей опорных реакций от его центра масс будут осуществляться в некой "оптимальной зоне". Но при выходе опорной точки за пределы диапазона, ограниченного лыжами, или выходе вектора равнодействующей опорных реакций за пределы "оптимальной зоны", лыжник окажется в состоянии неустойчивого равновесия.
Для возможности возвращения к устойчивому движению ему потребуются определенные действия, которые могут предотвратить падение, но несомненно повлияют на траекторию и скорость. Механика потери и восстановления устойчивости была описана в [7] и показана в количественном выражении.
Рис.1

Следует отметить, что для спортсмена поперечный диапазон перемещений опорной точки для восстановления равновесия ограничен не лыжами, а значительно меньшим отрезком. Это связано с желанием сохранения определенного алгоритма изменений перераспределения нагрузок между лыжами в повороте, которое сформировано индивидуальными техническими навыками.
Кроме того, при выполнении поворота б'ольшая доля сил и энергии лыжника расходуется на поддержание равновесия [10]. Чем ближе к равновесному будет положение лыжника в повороте, тем меньше будет требоваться энергозатрат на поддержание этого положения и выполнение поворота.
Это позволит в большей степени сосредоточиться на траектории, скольжении и управлении опорными реакциями для увеличения скорости в повороте. Положение опорной точки при этом имеет существенное смещение к внешней от поворота лыже в силу преимущественной ее загрузки при выполнении поворота. В случае изменения наработанного алгоритма перераспределения нагрузок, что неизбежно будет возникать при восстановлении и потере равновесия, опорные реакции, включая силы трения, будут изменяться непредсказуемо и приводить к потере скорости.
Поэтому спортсмен двигается в дуге со значительно меньшим запасом устойчивости, минимизируя диапазон отклонений опорной точки между лыжами, находясь в некой потенциальной яме, стремясь наименьшим образом влиять на отработанный алгоритм изменений перераспределения нагрузок между лыжами.
Чем выше мастерство спортсмена, тем ближе его положение к равновесному, тем меньше поперечный диапазон перемещений опорной точки, тем меньше "оптимальная зона" отклонений равнодействующей опрных реакций от его центра масс. Учитывая стремление спортсмена выполнять повороты в максимально близком положении к равновесному, максимально минимизируя "оптимальную зону" отклонений вектора равнодействующей опорных реакций от центра масс, уменьшая этим все моменты приложенных сил к системе "лыжник-лыжи" [10] и сведению их к нулю, с учетом допущенных приближений будем считать, что при выполнении спортсменом поворота в сбалансированной стойке [10]: 1) в соответствии с теоремой о движении центра масс [6], выполняется первое условие равновесия в подвижной системе отсчета, связанной с центром масс системы, – это равенство нулю суммы всех приложенных сил, включая переносную поступательную силу инерции; 2) выполняется второе условие равновесия, а именно равенство нулю суммы моментов всех приложенных сил относительно какой–либо точки системы.
Условие выполняется когда линии действия этих двух равнодействующих совпадают и, следовательно, проходят через центр масс системы. В соответствии с теоремой об изменении кинетического момента равенство нулю суммы моментов всех приложенных сил означает отсутствие изменений кинетического момента системы, что при исходном малом его значении означает отсутствие быстрых вращений тела лыжника с плавными и незначительными изменениями стойки при выполнении поворота.
Существует и обратная зависимость: спортсмен интуитивно в целях обеспечения положения наиболее близкого к равновесному в повороте старается вести тело по траектории с плавной, нерезкой динамикой стойки, не вызывающей изменений кинетического момента системы "лыжник-лыжи". Но при выходе опорной точки за пределы поперечного диапазона, ограниченного лыжами, лыжник оказывается в состоянии неустойчивого равновесия со всеми вытекающими последствиями (рис. 1). А именно, с увеличением кинетического момента системы.
Такое состояние равновесия - крайне нестабильное, неустойчивое при выходе опорной точки за пределы отрезка, ограниченного лыжами, и стабильного, устойчивого при нахождении опорной точки в пределах этого отрезка, соответствующее абсолютному минимуму энергии, характеризующему устойчивую систему, соответствует метастабильному равновесию. Метастабильная система сохраняется в состоянии равновесия до тех пор, пока к системе не будет приложено достаточное количество сил, чтобы привести ее в новое состояние: либо метастабильное, либо стабильное. Таким образом, спортсмен выполняет повороты в состоянии динамического метастабильного равновесия.
Спуск лыжника по склону состоит из чередующихся разнонаправленных дуг и участков перехода между ними. Движение лыжника по дугам характеризуется его наклоном внутрь траектории, который меняется на противоположный при переходах. При движении лыжника по дуге поворота под действием силы тяжести и инерционных сил возникает давление на склон. Лыжи загружаются, выполняется фаза загрузки. В моменты переходов между дугами давление на склон уменьшается, лыжи разгружаются, выполняется фаза разгрузки, в которой лыжник приобретает необходимые вращения для выполнения противоположно направленной дуги, в том числе во фронтальной плоскости, инверсируя свой наклон в новую траекторию.
В работе [10] были описаны две основные фазы горнолыжного поворота: фаза загрузки и фаза разгрузки. Определяющими критериями фазы загрузки является движение лыжника по дуге поворота в состоянии динамического метастабильного равновесия с опорными реакциями, существенно превышающими вес лыжника.
Фаза разгрузки характеризуется неравновесным положением с наличием опорных реакций, не превышающих веса лыжника, или полным отсутствием опорных реакций с баллистической траекторией центра масс. Причем в плоскости склона в фазе разгрузки траектория центра масс практически прямолинейна с неярко выраженной параболичностью вследствие выполнения поворота на наклонной поверхности.
Из [13] следует, что на практике в слаломной трассе угол входа в поворот и выхода из поворота соответствует, как правило, 60 градусам. Следовательно, в фазе разгрузки центр масс спортсмена при переходах между дугами перемещается под углом 60 градусов к линии ската. В фазе разгрузки лыжник имеет определенную динамику стойки, которая была им задана на момент выхода из предыдущего поворота.
Такая динамика стойки имеет безопорные или малоопорные вращения, главным из которых является вращение во фронтальной плоскости, инверсирующее наклон тела спортсмена в предстоящую траекторию. В фазе разгрузки отсутствует возможность изменения динамики стойки, заданной при выходе из предыдущего поворота, в силу отсутствия соответствующих опорных реакций, которые лыжник умышленно минимизирует или избегает для возможности переноса тела в предстоящую траекторию, что осуществимо при отсутствии равновесия.
Для выполнения поворотной дуги лыжнику необходимо изменить направление своего условно прямолинейного в плоскости склона инерционного неравновесного движения фазы разгрузки под углом к линии ската на движение по дуге поворота определенного или желаемого радиуса кривизны, создав определенную стойку выполнения поворота.
Очевидно, что мгновенно начать движение по определенному радиусу кривизны в соответствующей стойке поворота не получится. Для этого требуются определенные технические действия, определенное время и дистанция пути. Или, говоря иными словами, для этого требуется выполнить вхождение в поворот, скорректировав свою стойку для выполнения желаемой траектории. Создание стойки поворота становится возможным с появлением соответствующих опорных реакций, что свидетельствует о начале загрузки.
С появлением опорных реакций лыжник для создания стойки поворота корректирует скорость, траекторию, свой наклон, изменяя свои вращения фазы разгрузки, приобретенные при выходе из предыдущего поворота. Инициирование предстоящего поворота предполагает определенные изменения стойки, которые необходимы для выполнения поворота, что возможно только с появлением соответствующих опорных реакций, то есть с момента начала загрузки. Поэтому можно сказать, что спортсмен описанными действиями вхождения в поворот инициирует выполнение желаемой траектории.
Учитывая используемые термины в горнолыжном обиходе "инициация" и "ведение", но не описанные с позиции физики в горнолыжной методической литературе, фаза вхождения в поворот соответствует фазе инициации поворота, а фаза выполнения дуги поворота соответствует фазе ведения дуги поворота. Таким образом, в фазе загрузки можно выделить фазу инициации поворота и фазу ведения дуги поворота.
Естественные процессы образования опорных реакций в горнолыжном повороте.
Физические параметры криволинейной траектории горнолыжного поворота: скорость лыжника, его наклон и радиус кривизны возникающей траектории взаимозависимы, взаимосвязаны и зависят от процесса образования опорных реакций.
В работе [4] были математически расчитаны и графически показаны естественные горнолыжные траектории с естественными динамиками углов наклона лыжника, возникающие в карвинговом повороте при движении лыжника по подобию движения твердого тела, то есть без функций управления лыжником траекторией своего движения.
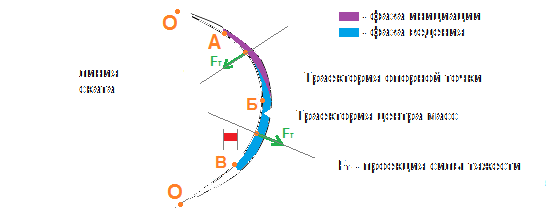
Естественные траектории возникают при естественном процессе образования опорных реакций, возникающих в дуге поворота. Так как горнолыжные повороты выполняются на наклонной поверхности, естественные процессы образования опорных реакций в дуге поворота имеют свою особенность. И эта особенность связана с изменениями значений вектора проекции силы тяжести на линию действия центростремительного ускорения и с инверсией этого вектора в точке Б, в которой касательная к траектории центра масс в плоскости склона параллельна вектору скатывающей силы (рис.2).
По этой причине опорные реакции имеют тенденцию к прогрессирующему увеличению на протяжении всей поворотной дуги, и как следствие, наклон лыжника так же прогрессирующе увеличивается, а радиус траектории прогрессирующе уменьшается. С увеличением крутизны склона эти прогрессии все более усугубляются.
Рис.2
В работе [12] рассматривался карвинговый поворот, но с управлением траекторией движения со стороны лыжника с помощью различных алгоритмов выполнения бедренной ангуляции [8]. Но, несмотря на это, процессы образования опорных реакций в поворотных дугах по своей сути не отличаются от их естественного образования в карвинговом повороте без ангуляции, и также имеют тенденцию к прогрессирующему увеличению по мере выполнения поворота с соответствующими динамиками наклона лыжника и радиуса кривизны его траектории.
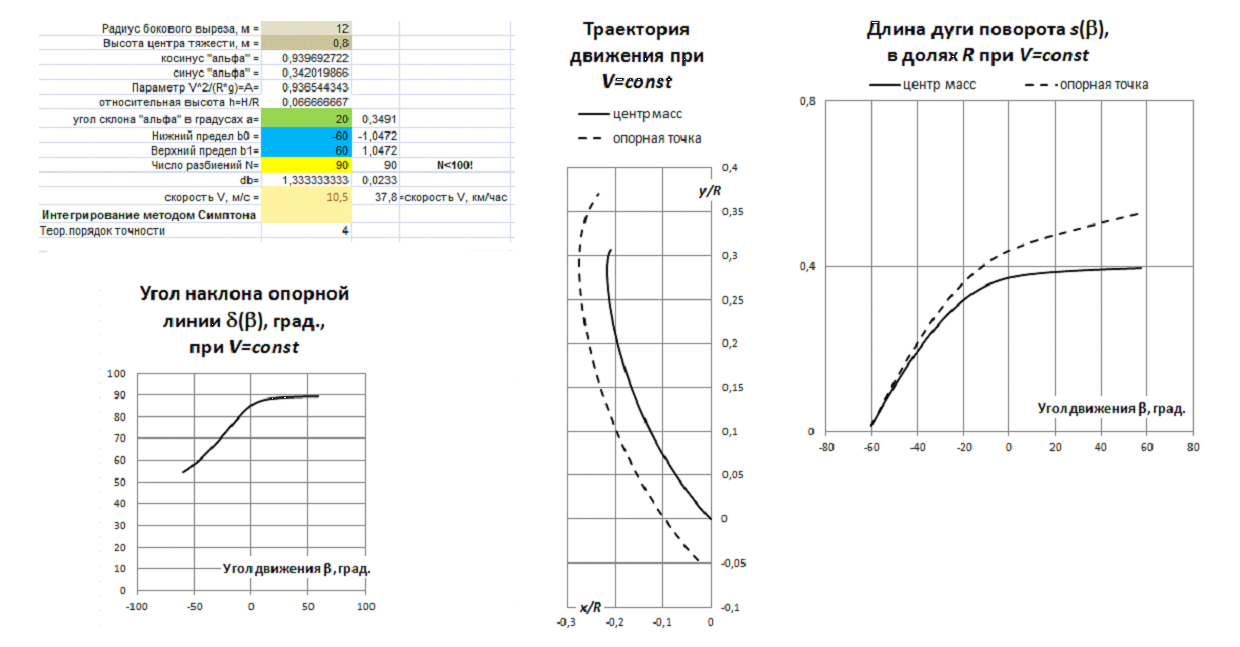
Если в качестве примера естественного процесса образования опорных реакций [4] задать значение угла наклона склона, задать предельно допустимый наклон лыжника в 60 градусов, боковой вырез лыжи, углы входа/выхода поворота и другие стандартные параметры выполнения поворота, то будет возникать закономерное увеличение наклона в повороте (рис.3), что является следствием процесса образования опорных реакций. А задав стандартные значения выполнения слаломного поворота на скорости, сопоставимой со скоростями прохождения слаломных трасс высоко квалифицированными спортсменами, наклон тела в карвинговом повороте (без проскальзывания лыж) к концу поворота будет приближаться к 90 градусам (рис.4), что на практике, в принципе, невозможно.
Траектория дуги поворота при естественном образовании опорных реакций будет всегда иметь пологое начало и крутое завершение. Из этого следует, что в конце поворота возникают избыточные опорные реакции, существенно превышающие опорные реакции необходимые для наклона, соответствующего среднему радиусу выполняемого поворота.
Избыточные опорные реакции негативно влияют на скорость спортсмена в повороте. А недостаток опорных реакций в начале поворота приводит к медленному увеличению наклона и не позволяет создать необходимый наклон, удовлетворяющий радиусу заданной траектории. Кроме того, естественное увеличение наклонов в поворотах существенно увеличивает их амплитуду во фронтальной плоскости относительно нормали к склону в связанных поворотах, что будет приводить к увеличению временных и физических затрат лыжника на инверсии наклонов в свои траектории.
Рис.3
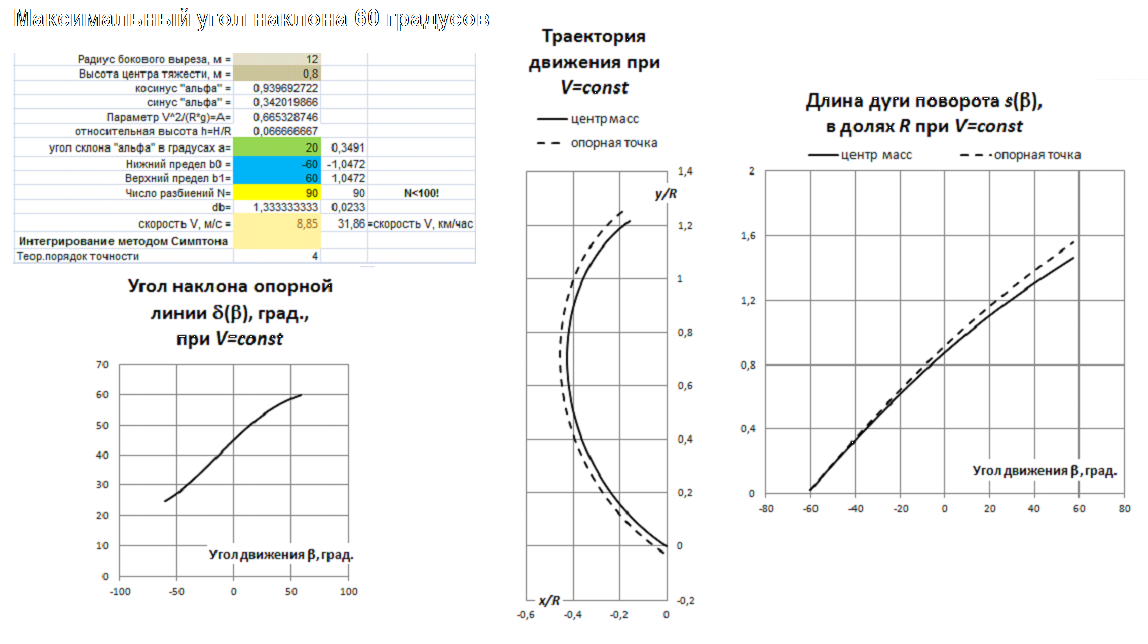
Рис.4
Таким образом, выполняя поворот без управления опорными реакциями с их естественным образованием, своевременно увеличить наклон, соответствующий заданному радиусу кривизны, сохраняя баланс и положение динамического метастабильного равновесия, не получится. Наклон лыжника будет увеличиваться постепенно, в соответствии с процессом естественного образования опорных реакций.
Увеличение наклона в начале поворота без управления опорными реакциями возможно при отсутствии равновесия, что является фактически началом падения на склон, но с надеждой восстановления равновесия непосредственно в самом повороте. Такой малопрогнозируемый и неконтролируемый способ увеличения наклона не только связан с большим риском падения, но также не позволит поддерживать в дуге поворота оптимальные значения опорных реакций и минимизировать диссипативные силы.
В случае предотвращения падения, что связано с управлением опорными реакциями, необходимыми для восстановления равновесия и для дальнейшего создания необходимой стойки поворота, неизбежны непредсказуемые скачки значений опорных реакций, вызывающие торможение и отклонения от желаемой траектории [7]. Кроме того, предотвращение падения требует существенных энергетических затрат и исключает использование мелкой моторики для точного управления траекторией и скоростью выполнения поворота [10].
Естественные процессы образования опорных реакций задают определенную динамику искривления траектории и изменения наклона тела, на которые можно повлиять лишь изменив процесс образования опорных реакций, что осуществимо в результате определенного воздействия на опору техническими действиями лыжника, описание которых не является целью данной работы. В данной работе управление опорными реакциями со стороны лыжника рассматривается в рамках механического аспекта и учитывается в общем виде как сгибание тела лыжника вдоль опорной линии, уменьшающее опорные реакции, и разгибание (распрямление) тела вдоль опорной линии, их увеличивающее.
Анализ фазы загрузки. Фаза ведения дуги поворота
Спортсмену при прохождении спортивной трассы необходимо двигаться по дугам, огибающим поворотные флаги. Необходимо попадать в траектории поворотов, которые определены соответствующей постановкой стоек и флагов. Это означает, что заданы примерные траектории поворотов или заданы средние радиусы кривизны траекторий каждого поворота на трассе.
Учитывая заданные траектории поворотов, наклон лыжника в этих поворотах будет отражать скорость их выполнения. Чем б'ольшие наклоны создает лыжник в поворотах, тем большей скоростью он обладает. Поэтому, учитывая прохождение спортсменом трассы на определенной скорости, можно говорить о необходимости определенных наклонов его тела для каждого из выполняемых поворотов в соответствии с заданными радиусами кривизны. То есть, постановкой трассы задается необходимый для лыжника наклон каждого поворота, соответствующий радиусу и скорости его выполнения.
Поэтому наклон лыжника в повороте является хорошей демонстрацией мастерства, профессиональных и технических навыков и способностей спортсмена. Создание необходимого наклона является важной целью и задачей, важной визуальной оценкой и характеристикой выполнения поворота, от которой в большей степени зависит скорость движения спортсмена по трассе.
Специфика горнолыжного спортивного поворота заключается в умении создания наклонов тела в поворотах. Б'ольшие наклоны требуют большего мастерства и технической подготовки, а также требуют определенной динамики их увеличения. Чем быстрее спортсмен способен увеличивать свой наклон, тем потенциально быстрее способен двигаться по трассе. Поэтому на протяжении всей своей спортивной карьеры спортсмены совершенствуют и шлифуют свое умение владения своим телом и лыжами для увеличения наклонов в поворотах, так как это позволяет увеличивать угловую скорость выполнения поворотов, что приводит к увеличению скорости движения по трассе. Кроме того, спортсмену необходимо умение оперативного, быстрого создания нужного наклона в повороте с сохранением динамического метастабильного равновесия.
Наклон лыжника в повороте зависит от опорных реакций. Учитывая естественный процесс их образования, ситуацию с недостатком опорных реакций в начале поворотной дуги и с их переизбытком в конце для создания необходимого наклона в соответствии с заданной траекторией и начальной скоростью ее выполнения, спортсмену необходимо изменить своими техническими действиями. И привести опорные реакции примерно к одинаковым значениям, что может соответствовать выполнению аналогичного поворота на горизонтальной поверхности при естественном образовании опорных реакций и возникновению правильной траектории (при α = 0 [4]).
Поэтому одной из главных задач спортсмена является задача перераспределения опорных реакций, возникающих в поворотной дуге, и выравнивание возникающего давления на лыжах со стороны склона во всех точках загрузки, и приведение опорных реакций примерно к одинаковым значениям с возможными отклонениями, учитывая многообразие условий выполнения поворотов на спортивной трассе и учитывая необходимость получения дополнительных импульсов вращения тела в предстоящей разгрузке.
Выравнивание давления лыжник обеспечивает своими техническими действиями: разгибанием тела вдоль опорной линии в начале загрузки и сгибанием тела вдоль опорной линии в ее окончании. В результате разгибания опорные реакции в начале загрузки будут увеличиваться относительно их естественного образования, и это позволит увеличить наклон и уменьшить радиус кривизны траектории уже в самом начале загрузки.
А в результате сгибания к окончанию загрузки опорные реакции будут меньше их естественных значений, что спровоцирует меньший наклон в повороте и некоторое распрямление траектории центра масс в сравнении с естественной траекторией. В результате наклон тела спортсмена в повороте будет сохраняться, а траектория поворота будет больше напоминать правильную траекторию.
Теоретически, спортсмену, учитывая инверсию вектора проекции силы тяжести на линию действия центростремительного ускорения в точке Б (рис.2) для выравнивания опорных реакций необходимо до этой точки разгибаться, а после ее прохождения - сгибаться.
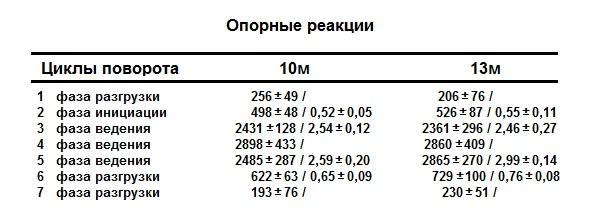
По экспериментальным данным [13], полученным с систем датчиков, которые устанавливались на профессиональных спортсменах высокой квалификации в условиях прохождения реальных спортивных трасс с расстановкой стоек 10 и 13 метров, следует, что на определенном участке траектории (циклы 3, 4, 5 табл. 1) значения наклона тела имели примерно одинаковые значения с отклонениями около 10%. Опорные реакции изменялись несколько в большем диапазоне около 15% (циклы 3, 4, 5 табл.2). Причем динамики наклонов и опорных реакций у всех испытуемых были схожи. Угол закантовки на участке ведения так же практически сохраняется, имея незначительные отклонения в 8%.
Табл.1
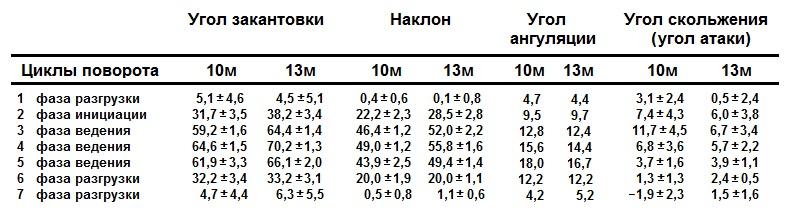
Табл.2
Такие незначительные отклонения значений наклонов тела на этом участке траектории могут свидетельствовать, что спортсмены стремятся к созданию определенного наклона в повороте и его сохранению на достаточно длительном участке траектории, выравнивая опорные реакции и приводя их примерно к одинаковым значениям.
Стойка спортсменов на этом участке траектории (циклы 3, 4, 5), учитывая необходимость выполнения поворота в состоянии динамического метастабильного равновесия, стабильна, сбалансирована и малодинамична [10]. Кроме того, при прохождении поворота спортсмену важно выбрать такую динамику стойки, которая бы позволила добиться максимального эффекта от действия скатывающей силы, что позволило бы получать ускорение при движении вниз по склону с минимальными диссипативными силами.
В методическом плане спортсмену для возможности быстрого преодоления поворотов на трассе необходимо умение очень быстрого изменения условно прямолинейной в плоскости склона траектории разгрузки на траекторию поворота заданного радиуса. Для этого спортсмену до поворотного флага необходимо успеть направить лыжи вниз по склону для разгона по траектории поворота в стойке, минимизирующей диссипативные силы, включающие опорные реакции и силы аэродинамического сопротивления, сосредотачивая свое внимание на улучшении скольжения, улучшении сцепления лыж, оперируя для этого мелкой моторикой.
Стойка спортсмена на протяжении всего этого участка претерпевает незначительные плавные изменения, связанные с одновременным последовательным увеличением ангуляционного положения, о чем свидетельствует динамика угла ангуляции (табл. 1), и сгибанием тела вдоль опорной линии на протяжении прохожения всего этого участка (циклы 3, 4, 5). Это позволяет уменьшать угол скольжения (табл. 1) и добиваться минимальных сил сопротивления движению, включая силы аэродинамического сопротивления.
Таким образом, для спортсмена очень важно как можно быстрее и раньше войти в поворот или начать движение по траектории поворота заданного радиуса, начать загружать лыжи, создавая предпосылки оптимальной динамики стойки, включая необходимый наклон тела относительно своей скорости и заданного радиуса поворота. И этот участок траектории, на котором спортсмен двигается по заданному радиусу дуги поворота с примерно одинаковыми значениями опорных реакций и наклона тела, является самым важным и ответственным для обеспечения максимальной скорости прохождения трассы.
На этом участке траектории спортсмен стремится к созданию определенной, достаточно стабильной и сбалансированной стойки, которая позволяет выполнять поворот в состоянии динамического метастабилього равновесия на максимально возможной для него скорости. Важно отметить, стойка спортсмена в фазе ведения практически не зависит от крутизны выполняемых поворотов, и является индивидуальной технической характеристикой и особенностью конкретного спортсмена. Описанный участок траектории с примерно одинаковыми значениями опорных реакций и углов наклона тела следует называть фазой ведения дуги поворота или фазой ведения.
Анализ фазы загрузки. Фаза инициации поворота
Как было отмечено выше, для создания условий благоприятных для выполнения фазы ведения, включающих определенную траекторию, скорость, динамику стойки с необходимым наклоном тела, требуется определенное время, то есть требуется выполнить вхождение в поворот или его инициировать. Для этого необходимо изменить условно прямолинейную траекторию центра масс фазы разгрузки, увеличить наклон, доведя его до необходимого в соответствии с заданным радиусом и имеющейся скоростью. Это возможно при создании соответствующих опорных реакций, начинающих искривлять траекторию центра масс в плоскости склона, и это будет свидетельствовать о начале загрузки и начале фазы инициации.
Динамика изменения кривизны траектории зависит от сил трения, возникающих при контакте лыж с поверхностью склона. Управление опорными реакциями, включающими силы трения, осуществляется техническими действиями лыжника благодаря изменению угла скольжения лыж, а также благодаря изменению давления на склон посредством сгибания и разгибания тела вдоль линии опоры и внешнего от поворота бедра, испытывающего б'ольшую нагрузку.
В фазе инициации необходимо увеличение опорных реакций посредством увеличения угла скольжения и выполнения разгибания, так как при выполнении поворота с естественным образованием опорных реакций их недостаток в начале поворотной дуги не позволяет достаточно быстро увеличивать наклон и динамично искривлять траекторию. Чем круче траектория предстоящего поворота, тем для изменения траектории требуется создание б'ольших опорных реакций, включая силы трения, и требуется больший угол скольжения.
Силы трения скольжения и бокового смещения лыж при изменении угла скольжения [3, 6], являясь компонентами опорных реакций, существенно влияют на скорость лыжника. Управляя опорными реакциями в дуге поворота, лыжник способен как увеличивать, так и уменьшать скорость своего движения. Увеличение угла скольжения без выполнения ротации бедра от поворота, что может применяться при выполнении дрифта, приводит к увеличению поперечных движению сил трения, которые могут быть еще более увеличены при дополнительном разгибании лыжника, что приводит к еще большему уменьшению скорости движения. Кроме того, чем больше скорость прохождения поворотов на трассе, тем б'ольшие углы наклонов тела требуются для их прохождения. Это заставляет спортсмена ускорять создание необходимых наклонов, что приводит к увеличению угловых скоростей вращений опорной линии во фронтальной плоскости в фазах разгрузок. Это вызывает неизбежные отрывы лыж от склона и безопорные переходы лыжника между дугами.
На основании полученных данных [4, 12], в которых не учитывались функции управления опорными реакциями со стороны лыжника, регулирующие скорость выполнения поворотов, следует, что выполнение карвингового (резаного) поворота, то есть поворота без проскальзывания лыж, ограничивается крутизной склона, скоростью, траекторией лыжника. И карвинговая траектория, зависящая от геометрии лыж, возможна лишь на углах наклонов склонов, изменяющихся в определенных расчетных диапазонах. На склонах с наклонами больше расчетных [4] карвинговый поворот не реализуем. По сути, это означает, что на склонах большей крутизны для реализации карвингового поворота требуется корректировка начальной скорости до выполнения поворота посредством создания угла скольжения. Это позволит выполнять на склонах любой крутизны траектории максимально приближенные к карвинговым.
Создание необходимого наклона для выполнения поворота начинается с его инверсии и увеличения в неравновесном положении при еще условно прямолинейной траектории центра масс в плоскости склона в фазе разгрузки. В фазе разгрузки наклон увеличивается по сценарию, заданному на момент выхода из предыдущего поворота. С началом загрузки, с появлением соответствующих опорных реакций начинается контролируемое увеличение наклона и искривление траектории центра масс в плоскости склона.
Перед выполнением предстоящего поворота спортсмен оценивает его траекторию, предвидя на рефлекторном уровне необходимую стойку для его прохождения с учетом сложности поворота, крутизны траектории, с учетом имеющейся скорости, рельефа, качества и специфики снежно-ледового покрытия, возможных неровностей и ям. И самое главное, спортсмен учитывает свои технические возможности, профессиональный навык, мастерство, которые позволят ему войти в поворот с определенной динамикой стойки и наклона для дальнейшего выполнения ведения дуги поворота. В случае сложности создания необходимого наклона, обеспечивающего выполнение поворота на имеющейся скорости и с учетом всей сложности и специфики поворота, спортсмен будет вынужден корректировать свою скорость, увеличивая опорные реакции посредством увеличения угла скольжения и выполнения более интенсивного разгибания (положения 2, 3, 4 на кинограмме 3).
Таким образом, лыжник при вхождении в поворот, создавая наиболее благоприятную стойку прохождения поворота, управляя опорными реакциями, неосознанно (рефлекторно) изменяет взаимозависимые и взаимосвязанные между собой физические параметры криволинейной траектории (скорость, наклон, кривизну траектории), подбирая для себя оптимальную динамику их комбинаций. В результате корректируется скорость, динамика наклона, динамика искривления кривизны траектории. Все это происходит благодаря созданию угла скольжения лыж.
Фаза загрузки характеризуется динамическим метастабильным равновесием лыжника, которое достигается посредством первоначального контакта лыж с опорой и/или соответствующего воздействия на опору. С появлением опоры, воздействуя на опору в самом начале загрузки, управляя опорными реакциями, лыжник управляет своей стойкой, находя баланс сил, добивается динамического метастабильного равновесия.
Для балансировки своей стойки спортсмену необходим угол скольжения, который позволяет смещать опорную точку (точку приложения равнодействующей опорных реакций в плоскости склона), во-первых, во фронтальной плоскости для изменения наклона, так как опорная точка с увеличением угла скольжения геометрически отодвигается от проекции центра масс на склон в поперечном направлении движению от центра поворота, и, во-вторых, в сагиттальной, так как с увеличением угла скольжения проекция центра масс на лыжи геометрически смещается в сторону мысков лыж, что позволяет регулировать стойку в продольном направлении.
Поэтому в результате изменения угла скольжения в сочетании с необходимым давлением на склон (разгибанием) спортсмен, увеличивая силы трения, изменяет скорость, изменяет положение опорной точки относительно центра масс, увеличивая свой наклон и находя баланс сил, действующих в повороте для обеспечения динамического метастабильного равновесия.
В фазе инициации поворота проскальзывание лыж возникает как неизбежная необходимость создания определенных условий выполнения поворота: увеличение наклона, корректировка скорости, динамика искривления траектории, обеспечение динамического метастабильного равновесия, создание предпосылок динамики стойки для ведения дуги поворота. Таким образом, угол скольжения в начале фазы загрузки является неотъемлемым техническим элементом вхождения в поворот, и в совокупности с разгибанием тела вдоль опорной линии позволяет эффективно управлять опорными реакциями.
Учитывая вышеизложенное, можно сделать следующий вывод, что вход в поворот сопряжен с увеличением диссипативных сил, которые необходимы для формирования благоприятных условий, позволяющих в фазе ведения, уменьшая диссипативные силы, максимально разгоняться по траектории поворота. Таким образом, вхождение в поворот начинается с быстрого увеличения угла скольжения и, дойдя до своего максимума, с началом уменьшения угла скольжения (табл. 1) начинается фаза ведения.
Описанный участок загрузки, на котором формируются условия и динамика стойки ведения дуги поворота, следует называть входом в поворот или фазой инициации поворота.
Упор, ангуляция, механическая система "лыжник-лыжи"
Упор - положение тела в повороте, обеспечивающее минимальные энергозатраты на сопротивление возникающей нагрузке без ущерба динамике стойки и состоянию динамического метастабильного равновесия.
Если рассматривать стойку лыжника как механическую систему, состоящую из кинематических звеньев и шарниров, то главным построением, обеспечивающим упор, является положение нижней опорной конечности (внешней от поворота ноги, принимающей б'ольшую нагрузку при выполнении поворота) в виде жесткого практически недеформируемого звена, соединяющего центр масс лыжника и место приложения равнодействующей опорных реакций в плоскости склона.
Для принятия такого положения необходимо зафиксировать коленный сустав (блокировать его подвижность) посредством полного выпрямления ноги и плотного прилегания икроножной мышцы к заднему спойлеру ботинка (рис.5а). Это позволит фиксировать таз относительно лыж в сагиттальной плоскости. Положение полностью "выпрямленной ноги" (термин, использующийся в горнолыжной среде) достигается при попытке ее полного выпрямления на горизонтальной поверхности в горнолыжном инвентаре с обязательным сохранением центральной стойки.
При соблюдении этого условия икроножная мышца будет плотно прилегать к заднему спойлеру ботинка, а нога выпрямится неполностью и будет немного согнута в коленном суставе из-за имеющегося наклона заднего спойлера ботинка вперед, не позволяющего расположить голень вертикально и этим допустить полное выпрямление ноги (рис.5а).
Рис.5а Рис.5б Рис.5в

![]()
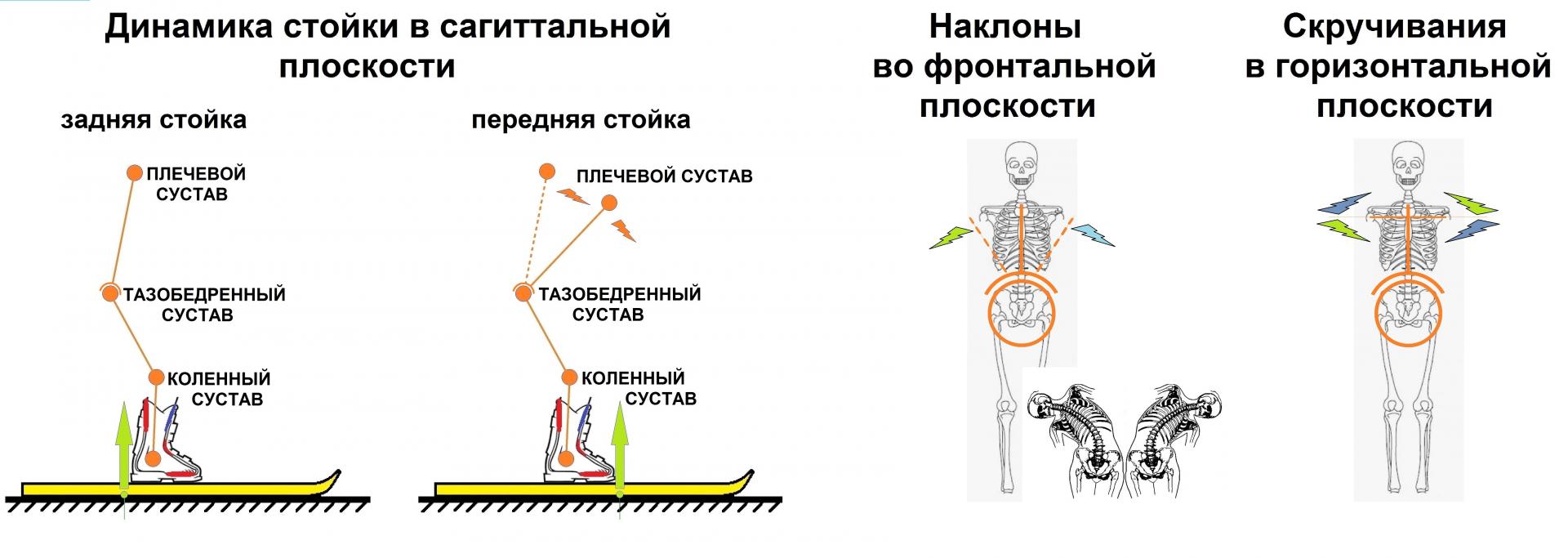
Такая постановка внешней от поворота ноги позволит исключить нежелательные отклонения лыжника в сагиттальной плоскости от выбранного им положения, отвечающего его пониманию как сбалансированного. При таком положении нижней конечности (в виде недеформируемой опорной конструкции) все управление стойкой в сагиттальной плоскости по оси направления лыж будет осуществляться посредством наклонов верхней части туловища вперед-вниз и назад-вверх в результате вращения в тазобедренных суставах, и визуально будет восприниматься как сгибание в пояснице (рис.6а). Это позволит очень точно перемещать проекцию центра масс на лыжи в продольном направлении и этим балансировать стойку в сагиттальной плоскости при выполнении поворота.
Рис.6а Рис.6б Рис.6в
![]()
Описанная биомеханика соответствует простейшей механической системе, состоящей из двух кинематических звеньев, соединенных цилиндрическим шарниром. Но сохранение подвижности в середине туловища и возможность выполнения боковых наклонов во фронтальной плоскости (рис. 6б) и скручивания в горизонтальной (рис. 6в) в результате подвижности позвоночного столба позволяет представить область, объединяющую тазобедренные суставы и талию, в виде своеобразного сферического шарнира (рис. 5в).
В этом случае стойку спортсмена, при ее соответствующем построении, можно представить в виде механической системы, состоящей из двух кинематических звеньев, соединенных сферическим шарниром, и имеющей шесть степеней свободы. Если рассматривать стойку лыжника в виде описанной механической системы, то возможности внутренней динамики такой системы позволяют в полной мере реализовывать горнолыжные траектории, позволяют управлять траекториями посредством вращений (наклонов) верхнего звена во фронтальной плоскости, обеспечивающих изменение углов закантовки лыж, и позволяют балансировать стойку в сагиттальной и фронтальной плоскостях.
Ангуляция [8] - это главный инструмент управления траекторией и равновесием спортсмена. Выполнение спортсменом поворотов - это не что иное, как смена разнонаправленных ангуляций. Главенствующую роль в динамике ангуляции выполняет бедренная ангуляция. Возможности описанной механической системы соответствуют действиям спортсмена на трассе при выполнении поворота, которые трактуются как выполнение бедренной ангуляции.
Соответствующее построение стойки достигается посредством: 1) описанного построения нижней опорной конечности (построения нижней части туловища в виде практически недеформируемой опорной конструкции по принципу строения твердого тела); 2) частичного закрепощения верхней части туловища с динамикой рук, помогающей выполнению наклонов и выполнению скручиваний верхней части туловища.
При таком построении стойки с сохранением подвижности в середине туловища, нижняя часть туловища будет играть роль "опорной конструкции", а верхняя - "балансира" (рис. 5б, 5в), с изменениями положения которого осуществляется все управление траекторией и равновесием. Построение стойки по подобию показанной механической системы позволяет балансировать стойку, как было отмечено выше, и в сагиттальной плоскости, и во фронтальной благодаря изменению ангуляционного положения.
Динамика ангуляции осуществляется одним действием [8], объединяющим три движения, благодаря совместной активации мышц, сосредоточенных в середине туловища, и имеющих связи, которые отвечают за отдельное выполнение любого из этих трех движений, возникает возможность совместного управления динамикой и любой комбинацией из этих движений: 1) сгибание тела и наклоны верхней части туловища вперед-вниз и назад-вверх в сагиттальной плоскости в результате вращения тазобедренных суставов (рис.6а); 2) сгибание в области талии в боковых направлениях во фронтальной плоскости (рис.6б); 3) скручивание тела (позвоночного столба) в горизонтальной (рис.6в).
Учитывая возможность объединения в одно действие разных динамик выполнения этих отдельных движений и их комбинаций, существует возможность создания различных вариантов ангуляционного положения с разными углами ангуляции и закантовки лыж. И этим действием осуществляется точное управление вектором равнодействующей опорных реакций в сагиттальной и фронтальной плоскостях.
Это позволяет управлять равновесием, и, кроме того, немного изменять длину опорного отрезка, соединяющего центр масс с опорной точкой. То есть выполнять благодаря ангуляции некоторую "вертикальную работу" - перемещение центра масс вдоль опорной линии. Так как увеличение ангуляции приводит к укорачиванию опорного отрезка, а уменьшение ангуляции без сгибания тела приводит к его удлинению.
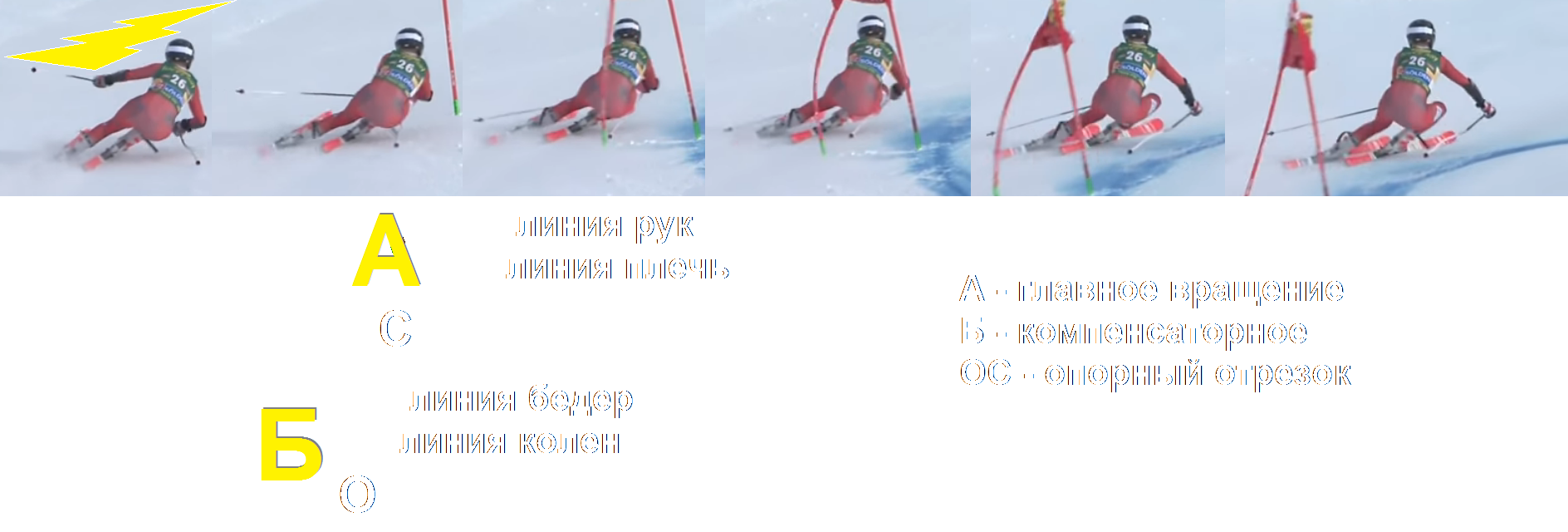
Создание стойки по подобию описанной механической системы позволяет максимально эффективно управлять опорными реакциями, состоянием динамического метастабильного равновесия, балансом, траекторией, скольжением, скоростью. Помимо управления траекторией и балансирования стойки возможности скручивания тела и позвоночного столба (вращение линии плеч относительно линии таза [8] в плоскостях перпендикулярных опорной линии) при синхронном задействовании рук (в большей степени внешней от поворота руки) позволяют создавать в процессе выполнения поворота дополнительный импульс вращения.
На кинограмме (рис. 6г) динамикой внешней от поворота руки (ее отведение от поворота примерно по линии действия центробежной силы (положение 1) и дальнейшее ведение внешней кисти по вектору скорости по напрвлению стрелки желтого цвета) и скручиванием тела в плоскостях, перпендикулярных опорной линии, спортсменом создается в плоскости склона импульс вращения, который увеличивает угловую скорость в повороте. Кроме того, скручивание тела при выполнении ангуляции придает стойке дополнительную жесткость и возможность стабильного движения по нужной траектории с минимальным влиянием на стойку (следовательно на траекторию) скачков опорных реакций, которые неизбежно возникают в повороте вследствие неидеальности полотна трассы. Построение стойки по подобию такой механической системы требует отдельного описания, и это будет освещено в последующих публикациях.
Рис.6г
![]()
Так как данная работа, прежде всего, носит методический характер, то следует отметить, что наиболее эффективное обучение равновесному выполнению поворотов будет достигаться при условии строгого построения стойки в соответствии с описанной механической системой: с отдельным закрепощением верхней и нижней частей туловища и с сохранением подвижности в середине туловища для выполнения наклонов и скручиваний.
При освоении выполнения поворота с динамикой стойки, соответствующей динамике описанной механической системы (динамике бедренной ангуляции), необходимо постепенно раскрепощать тело при выполнении поворота, все более подключая мелкую моторику, сохраняя, тем не менее, наработанный навык равновесного выполнения поворота с динамикой стойки по подобию описанной двухзвенной механической системы.
Временн'ое или дистанционное соотношение фаз инициации и ведения дуги поворота
Физическая модель горнолыжного спортивного поворота не зависит от технической дисциплины, едина и для коротких поворотов специального слалома, и для длинных скоростного спуска, несмотря на многие технические отличия. Ниже на кинограммах будут показаны фазы загрузки как в слаломе-гиганте, так и в специальном слаломе.
Таким образом, фаза загрузки, начинающаяся с вхождения в поворот или с инициации поворота в точке А (рис.2) завершается окончанием ведения дуги поворота в точке В (рис.2) примерно на уровне стойки поворотного флага. Визуально начало загрузки, то есть начало фазы инициации, можно определить по возникновению снежного шлейфа от лыж в самом начале поворота (рис.7), свидетельствующего об образовании поперечных движению сил трения в результате проскальзывания лыж и появлении угла скольжения. В этот момент лыжник выполняет торможение.
Рис.7

Динамика стойки спортсмена в этих фазах последовательна. Действия спортсмена в этих фазах взаимосвязаны и взаимозависимы. Фаза инициации плавно перетекает в фазу ведения. Для спортсмена целесообразно наиболее быстро входить в повороты, чтобы в фазах ведения получать максимальный эффект от действия скатывающей силы и получать максимальное ускорение.
Чем быстрее спортсмен будет входить в повороты, меняя траектории разгрузок на движение по траекториям заданных радиусов, создавая стойку с наименьшим сопротивлением движению, тем он быстрее будет двигаться по трассе. Поэтому предпочтительно, чтобы фаза входа в поворот протекала быстрее фазы ведения и выполнялась до линии ската.
Но, в связи с разнообразием и многовариантностью поворотов на трассе, которые имеют различную сложность прохождения, связанную с крутизной самих поворотов при расстановке ворот, с крутизной склонов и изменчивостью рельефов, с различными структурами покрытия (от льда до раскисшего снега) и с всевозможными неровностями, ямами, брустверами, ухабами и т.д., временн'ые соотношения фаз инициации и ведения могут существенно взаимно отличаться, так как все эти факторы влияют на динамику выполнения поворотов. И, как следствие, все эти факторы влияют на выполнение фаз загрузок, на протяженность фаз инициации и ведения относительно друг друга.
Спортсмен управляет своей скоростью и стойкой, изменяя угол скольжения и давление на склон, выполняя сгибание и разгибание вдоль линии опоры. Угол скольжения в фазе инициации увеличивается и имеет максимальное значение на границе фаз инициации и ведения (табл.1), а в фазе ведения плавно и быстро уменьшается, сходя на нет в начале разгрузки.
Величина угла скольжения в фазе инициации зависит от сложности выполнения конкретного поворота. На практике в простых незакрытых поворотах, например в пологих дугах, на пологих участках трассы, угол скольжения в фазе инициации визуально может быть незаметен и может казаться его отсутствие. Может создаться впечатление, что поворот выполняется без проскальзывания лыж. В таких поворотах фаза инициации существенно короче фазы ведения, так как спортсмену требуется меньше времени для входа в поворот, требуются меньшие диссипативные силы, благодаря которым он изменяет траекторию и создает оптимальную стойку ведения дуги поворота.
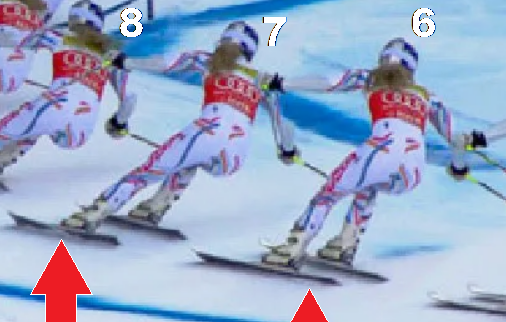
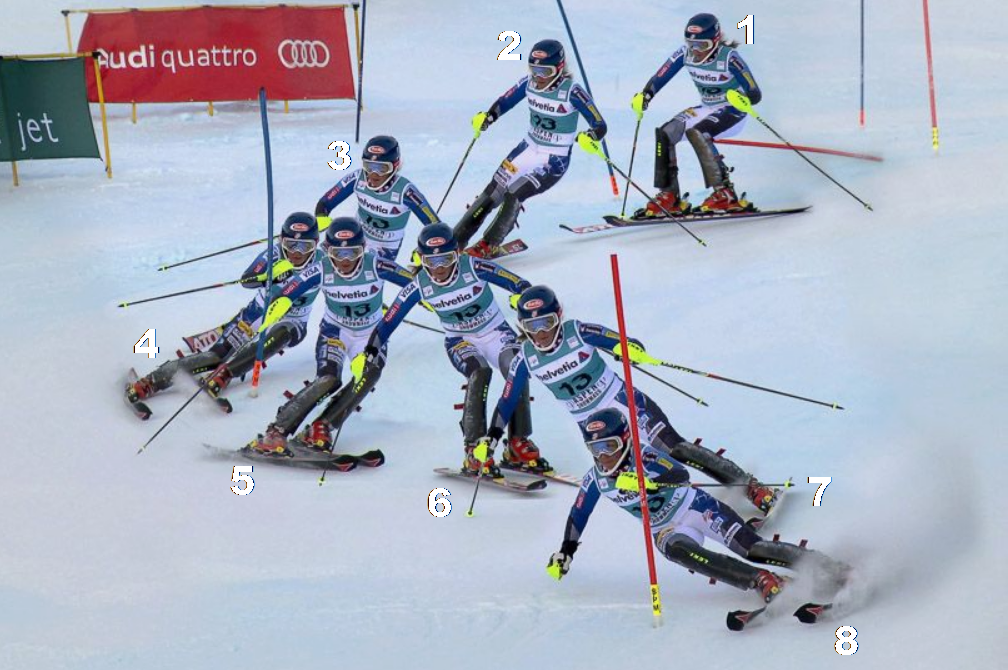
Например, на кинограмме 1 спортсменка выполняет незакрытый поворот на достаточно пологом участке трассы с очень короткой фазой инициации, начинающейся за ее положением 5 и заканчивающейся перед положением 7. Угол скольжения практически незаметен, но он присутствует. У спортсменки в положении 6 на кинограммах 1, 2 под пяткой внешней опорной лыжи заметно снежное образование, которое возникло вследствие смещения пяток лыж в поперечном направлении движению и давления на снег пяткой внешней лыжи. Это свидетельствует об образовании угла скольжения. В положении 7 на кинограммах 1, 2 снежное образование уже распределено по всей длине лыжи с ярко выраженной концентрацией под ботинком.
Это свидетельствует об упоре спортсменки в середину лыжи и практически об отсутствии угла скольжения. С положения 7 начинается фаза ведения и продолжается до положения 11 (кинограмма 1). В положении 6 видно как в результате разгибания внешнего от поворота бедра создается упор в повороте. С положения 7 начинается плавное и последовательное сгибание тела посредством опускания плеч в направлении опорной точки с сохранением упора внешним от поворота бедром. После создания существенного наклона тела в фазе инициации с положения 7 до положения 11 фазы ведения наблюдается мало динамичное изменение наклона с максимальным его значением в положении 10 в момент прохождения флага (кинограмма 1). Визуально данная динамика наклона в повороте соответствует динамике наклона в таблице 1.
Кинограмма 1

Кинограмма 2
На крутых склонах, на сложных участках трассы с леденистым покрытием, в сильно закрытых поворотах спортсмену требуется больше времени для корректировки скорости и изменения траектории центра масс. Приходится дольше инициировать поворот, выполняя торможение, разворачивая лыжи иногда практически поперек своей траектории. При этом спортсмену необходимо прилагать б'ольшие усилия и сопротивляться большей нагрузке. Возникают существенные диссипативные силы. В таких поворотах фаза инициации может завершаться на линии ската в точке Б (рис. 2) или даже после прохождения этой точки согласно положению 4 стойки спортсмена (кинограмма 3), оставляя совсем малый отрезок дуги поворота (положения 5, 6 кинограммы 3) на выполнение фазы ведения и разгон по траектории поворота. Кроме того, чем больше скорость спортсмена на трассе, тем ему необходимо быстрее инициировать повороты. И это требует б'ольших физических усилий.
Кинограмма 3

![]()
Кинограмма 4
Таким образом, в фазе инициации спортсменом быстро и динамично создается максимальный угол скольжения, необходимый для выполнения данного поворота, и выполняется динамичное разгибание, увеличивающее опорные реакции (положения 3, 7 на кинограмме 4). И, как следствие, траектория центра масс в плоскости склона начинает стремительно искривляться, увеличивается наклон тела в повороте, корректируется скорость, лыжник переходит в состояние динамического метастабильного равновесия.
Диссипативные силы в фазе инициации увеличиваются. Переход фазы инициации в фазу ведения обусловлен достижением наклона, необходимого для выполнения поворота, созданием упора с почти полным выпрямлением внешнего от поворота бедра для сопротивления нагрузке и для стабилизации стойки (положения 4, 8 на кинограмме 4). Фаза ведения начинается после положений 3 и 7 и заканчивается перед положением 5 на кинограмме 4. Угол скольжения начинает уменьшаться и практически сходит на нет в начале разгрузки. Диссипативные силы в фазе ведения уменьшаются.
Стойка претерпевает на протяжении всей фазы ведения малодинамичные, плавные изменения с увеличением ангуляции (угол ангуляции, таблица 1) и сгибанием тела вдоль опорной линии, позволяющим уменьшать нарастающие естественные опорные реакции и выравнивать их значения с сохранением упора практически на протяжении всей фазы ведения. Причем для сгибания тела спортсмен использует два основных инструмента.
Первым является опускание верхней части туловища в направлении опорной точки (положения 8, 9, 10 на кинограмме 1 и рис. 6а) в результате вращения тазобедренных суставов с возможностью опускания в большом, практически максимальном диапазоне вплоть до касания грудью внутреннего от поворота колена при крайней необходимости.
Вторым - сгибание внешней от поворота опорной ноги в коленном суставе, но в очень малом диапазоне (положения 5, 6 на кинограмме 3), так как голеностопный сустав фиксирован в горнолыжном ботинке и ограничивает сгибание ноги в коленном суставе, предотвращая этим потерю баланса в сагиттальной плоскости. Спортсмен выполняет описанные выше действия по своим внутренним ощущениям, исключая нарастающие естественные пиковые опорные реакции в конце загрузки.
Как следствие равномерного распределения опорных реакций, наклон тела в дуге поворота практически сохраняется. Угол скольжения в фазе ведения плавно и быстро уменьшается (табл.1) сходя на нет сразу за точкой В (рис.2) в начале разгрузки. В фазе ведения формируется стабильная, сбалансированная, малодинамичная, обтекаемая стойка, удобная и благоприятная для ведения дуги поворота и получения ускорения.
Таким образом, в фазе инициации создаются предпосылки оптимальной динамики стойки фазы ведения, в которой спортсмен старается сохранять свой наклон, перераспределяя и выравнивая опорные реакции для возможности прохождения поворота с максимально возможной скоростью. В результате описанных действий траектория центра масс в сравнении с естественной траекторией в фазе инициации становится более закругленной, а в окончании фазы ведения, наоборот, несколько распрямляется. На основании изложенного можно сделать вывод, что для спортсмена очень важно умение управления опорными реакциями, от которых зависят все характеристики поворота, включая скорость прохождения трассы.
В методическом аспекте при обучении и совершенствовании спортивного поворота в произвольных спусках и на слаломных трассах необходимо учиться корректировать скорость, подбирая удобную, для возможности сбалансированного прохождения поворота в состоянии динамического метастабильного равновесия, выполняя для этого торможение в фазе инициации посредством увеличения угла скольжения и динамичного разгибания с увеличением давления на склон. Несмотря на то, что критерием выполнения спортивного поворота является скорость прохождения трассы, описанные действия, приводящие к потере скорости в начале поворота в фазе инициации, рекомендуется выполнять на начальных этапах обучения акцентированно и более активно, не опасаясь существенной потери скорости.
Впоследствии на тренировках при полном овладении таким навыком прохождения поворота необходимо в фазе инициации выполнять меньшее торможение, подбирая наиболее благоприятную комбинацию угла скольжения и давления на склон, позволяющую выполнять фазу ведения на большей скорости с динамикой уменьшения угла скольжения с обязательным сохранением сбалансированной стойки. Кроме того, в фазе инициации необходимо создать надежный упор, который позволит сбалансировать и стабилизировать стойку при выполнении поворота.
Таким образом, фаза инициации поворота характеризуется увеличением опорных реакций, разгибанием тела вдоль опорной линии, созданием упора, увеличением диссипативных сил, увеличением угла скольжения, увеличением наклона, искривлением траектории центра масс в плоскости склона, уменьшением скорости, переходом в состояние динамического метастабильного равновесия.
Фаза ведения характеризуется сохранением достигнутых значений опорных реакций и углов наклона тела, положением упора, траекторией центра масс близкой к правильной, уменьшением диссипативных сил, сгибанием тела вдоль опорной линии, уменьшением угла скольжения, увеличением скорости, сбалансированной, стабильной, малодинамичной стойкой с плавным и последовательным малодинамичным сгибанием и с таким же плавным и последовательным малодинамичным увеличением ангуляционного положения, состоянием метастабильного динамического равновесия.
Заключение
В данной статье описаны две фазы загрузки горнолыжного спортивного поворота: фаза инициации поворота и фаза ведения дуги поворота. Рассмотрены их особенности и отличия. Обоснована необходимость проскальзывания лыж в фазе инициации поворота с возникновением максимального угла скольжения, необходимого для выполнения конкретного поворота, и его плавного уменьшения в фазе ведения.
Рассмотрена механика управления равновесием лыжника посредством изменения угла скольжения. Показаны естественные процессы образования опорных реакций. Обоснована необходимость управления лыжником опорными реакциями для изменения динамики и скорости выполнения поворота.
В работе определено состояние равновесия спортсмена горнолыжника при выполнении поворота как динамическое метастабильное равновесие.
Работа имеет большое методическое значение, так как в ней раскрыта динамика поворота, позволяющая, развивая описанный навык выполнения поворота, увеличивать скорость прохождения трассы. Понимание сущности фазы загрузки при обучении и совершенствовании спортивного поворота в рамках описанной динамики поворота позволит быстрее прогрессировать и развиваться, правильно управляя своей скоростью, используя фазу инициации для торможения, а фазу ведения для разгона по траектории поворота.
Литература
[1] Гилев Г.А., Леготин С.Д., Ривлин А.А. // Основная стойка горнолыжника и анализ условий ее выполнения с позиции биомеханики // Ученые записки университета им. П.Ф. Лесгафта. 2019. № 10 (176). С. 94-99.
https://www.researchgate.net/publication/356788469_OSNOVNAA_STOJKA_GORNOLYZNIKA_I_ANALIZ_USLOVIJ_EE_VYPOLNENIA_S_POZICII_BIOMEHANIKI
[2] Курс теоретической механики. Под редакцией К.С. Колесникова, 2017, 5-е изд.; Изд-во МГТУ им. Н. Э. Баумана, 2017. -580с.
[3] Леготин С.Д., Обносов К.Б., Ривлин А.А Механика горных лыж: поворт с боковым проскальзыванием и вибрацией на карвинговых лыжах // Российский журнал биомеханики. 2022. Т. 26. №3.С.29-44. https://www.researchgate.net/publication/347929723_Mechanics_of_alpine_skiing_carve_turn_with_angulation
[4] Леготин С.Д., Ривлин А.А., Данилин В.И. Механика горных лыж: резаный поворот без ангуляции. Инженерный журнал: наука и инновации, 2017, вып. 7, 15 с., DOI 10.18698/2308-6033-2017-7-1632. https://www.researchgate.net/publication/318335649_Mechanics_of_alpine_skiing_carve_turn_without_angulation
[5] Леготин С.Д., Ривлин А.А. Оценка предельных углов ангуляции спортсмена горнолыжника с использованием разработанного специализированного антропометрического стенда // Экстремальная деятельность человека. 2018. №3(49). С.27-31. http://dx.doi.org/10.18698/2308-6033-2017-7-1632
[6] Леготин С.Д., Ривлин А.А. Механика горнолыжного поворота с боковым проскальзыванием // В сборнике: Фундаментальные и прикладные задачи механики. Материалы Международной научная конференции (7-10.12.2021). В 2-х частях. Москва, 2022. С. 68-73.
ttps://www.researchgate.net/publication/361306820_The_mechanics_of_a_ski_turn_with_side_slip
[7] Леготин С.Д. Ривлин А.А. Механика потери устойчивости при повороте на лыжах // В сборнике: Фундаментальные и прикладные задачи механики. Материалы Международной научной конференции. 2019. С. 012020.
https://www.researchgate.net/publication/344349751_Mechanics_of_stability's_loss_in_the_skiing_turning
[8] Ривлин А.А., Леготин С.Д. Ангуляция как основа динамической стойки спортсмена горнолыжника // Культура физическая и здоровье. 2018. №1(65). С.63-69.
http://kultura-fiz.vspu.ac.ru/content/fizkultura_2018_v65_N1.pdf
[9] Ривлин А.А., Леготин С.Д., Умрюхин Е.А. Центральная стойка - основа горнолыжной техники // Культура физическая и здоровье. 2018. №3(67). С.44-49.
http://kultura-fiz.vspu.ac.ru/content/fizkultura_2018_v67_N3.pdf
[10] Ривлин А.А., Леготин С.Д. "О равновесии и неравновесии в горнолыжном спортивном повороте" // Культура физическая и здоровье. 2023 .- т. 88 , № 4 .- с. 277 - 286
[11] Физиология человека: в 3-х томах [Текст] / под ред. Р. Шмидта и Г. Тевса. – Т. 1. – М.: Мир, 2005.
[12] Legotin S.D., Obnosov K.B., Rivlin A.A. MECHANICS OF ALPINE SKIING: CARVE TURN WITH ANGULATION //В сборнике: Journal of Physics: Conference Series. Сер. "Fundamental and Applied Problems of Mechanics, FAPM 2019" 2020. С. 012034.
[13] Reid R (2010) A kinematic and kinetic study of alpine skiing technique in slalom. Ph.D. dissertation, Norwegian School of Sport Sciences.
http://hdl.handle.net/11250/171325
Bibliography
[1] Gilev G.A., Legotin S.D., Rivlin A.A. // The main stand of the skier and the analysis of its performance conditions from the perspective of biomechanics // Scientific notes of the P.F. Lesgaft University. 2019. No. 10 (176). pp. 94-99.
https://www.researchgate.net/publication/356788469_OSNOVNAA_STOJKA_GORNOLYZNIKA_I_ANALIZ_USLOVIJ_EE_VYPOLNENIA_S_POZICII_BIOMEHANIKI
[2] Course of theoretical mechanics. Edited by K.S. Kolesnikov, 2017, 5th ed.; Publishing House of Bauman Moscow State Technical University, 2017. - 580 p.
[3] Legotin S.D., Obnosov K.B., Rivlin A.A. MECHANICS OF ALPINE SKIING: a repeat with lateral slippage and vibration on carving skis // Russian Journal of Biomechanics. 2022. Vol. 26. No. 3. pp. 29-44. https://www.researchgate.net/publication/347929723_Mechanics_of_alpine_skiing_carve_turn_with_angulation
[4] Legotin S.D., Rivlin A.A., Danilin V.I. // Mechanics of alpine skiing: carve turn without angulation // Engineering journal: science and innovation. – 2017. - Issue. 7.
http://dx.doi.org/10.18698/2308-6033-2017-7-1632
[5] Legotin S.D., Rivlin A.A. Evaluation of the extreme angles of angulation of an alpine skier athlete using a developed specialized anthropometric stand // Extreme human activity. 2018. No. 3 (49). pp. 27-31.
https://www.researchgate.net/publication/354282232_OCENKA_PREDELNYH_UGLOV_ANGULACII_SPORTSMENA-_GORNOLYZNIKA_S_ISPOLZOVANIEM_RAZRABOTANNOGO_SPECIALIZIROVANNOGO_ANTROPOMETRICESKOGO_STENDA_EVALUATION_OF_THE_CRITICAL_ANGULATIONS_ANGLES_OF_THE_ALPINE_SKIE
[6] Legotin S.D., Rivlin A.A. Mechanics of alpine skiing turn with lateral slippage //In the collection: Fundamental and applied problems of mechanics. Materials of the International Scientific Conference (7-10.12.2021). In 2 parts. Moscow, 2022. pp. 68-73. https://www.researchgate.net/publication/361306820_The_mechanics_of_a_ski_turn_with_side_slip
[7] Legotin S.D., Rivlin A.A. Mechanics of stability’s loss in the skiing turning // Journal of Physics: Conference Series (JPCS) "International Meeting - Fundamental and Applied Problems of Mechanics" 2019. С. 012020.
https://www.researchgate.net/publication/344349751_Mechanics_of_stability's_loss_in_the_skiing_turning
[8] Rivlin A.A., Legotin S.D. Angulation as the basis of the dynamic skier stans // physical Culture and health. – 2018. – No. 1. - P. 63-69.
http://kultura-fiz.vspu.ac.ru/content/fizkultura_2018_v65_N1.pdf
[9] Rivlin A.A., Legotin S.D., Umryukhin E.A. Central position as the basis of alpine skiing // Physical culture and health. 2018. No. 3 (67). pp. 44-49.
http://kultura-fiz.vspu.ac.ru/content/fizkultura_2018_v67_N3.pdf
[10] Rivlin A.A., Legotin S.D. ABOUT BALANCE AND DISEQUILIBRIUM IN THE ALPINE SKIING TURN // Physical culture and health. 2023 .- т. 88 , № 4 .- с. 277 - 286
[11] Human physiology: in 3 volumes [Text] / ed. by R. Schmidt and G. Tevs. - Vol. 1. - Moscow: Mir, 2005.
[12] Legotin S.D., Obnosov K.B., Rivlin A.A. MECHANICS OF ALPINE SKIING: CARVE TURN WITH ANGULATION //В сборнике: Journal of Physics: Conference Series. Сер. "Fundamental and Applied Problems of Mechanics, FAPM 2019" 2020. С. 012034.
[13] Reid R (2010) A kinematic and kinetic study of alpine skiing technique in slalom. Ph.D. dissertation, Norwegian School of Sport Sciences.
http://hdl.handle.net/11250/171325